![]()
![]()
![]()
L'Oceanografia Física és una ciència experimental i requereix de l'observació i la mesura exacta per aconseguir els seus objectius. Es pot aprofitar l'experiència dels camps relacionats amb la física i la química i fer ús dels èxits assolits en les àrees de la tecnologia i l'enginyeria, però l'entorn oceànic imposa exigències úniques en els instruments que no són fàcils de complir amb els equips estàndard de laboratori. Com a conseqüència, el desenvolupament i fabricació d'instrumentació oceanogràfica s'ha convertit en una activitat especialitzada. Els fabricants d'equips oceanogràfics serveixen a un mercat petit, però aspiren a vendre els seus productes a tot el món.
Aquesta lliçó ofereix una visió general de la gamma d'instruments utilitzats al mar i els principis involucrats. El seu objectiu és cobrir els instruments clàssics stàndard, així com els moderns desenvolupaments. La següent taula resumeix el seu contingut.
| necessitat de recerca | equipament disponible / instrumentació |
|---|---|
| provissió de la plataforma d'observació |
|
|
mesura de propietast hidrogràfiques (temperatura, salinitat, oxígen, nutrients, traçadors) |
|
|
measura de propietats dinàmiques (corrents, ones, nivell del mar, processos de barreja) |
|
Totes les mesures al mar requereixen una plataforma raonablement estable per portar la instrumentació necessària. La plataforma pot estar en la superfície del mar, al fons del mar, a l'interior de l'oceà o a l'espai. L'elecció de la plataforma depèn de la seva capacitat per recollir la informació requerida en l'espai i el temps.
 Figura 13.1
Figura 13.1
Igual que qualsevol altre vaixell de navegació, els vaixells d'investigació han de complir amb el requisit d'estar en condicions de navegar i ser capaços de capejar el mal temps. Les condicions meteorològiques a l'àrea de recerca defineixen la mida mínima de l'embarcació. Els requisits addicionals, com ara el maneig d'equip pesat al mar o la necessitat d'una gran quantitat de científics en un estudi interdisciplinari, poden augmentar la mida mínima. Els vaixells típics de recerca a l'oceà són de 50 - 80 m de llarg, tenen un desplaçament total de 1.000 - 2.000 tones i proporcionen allotjament per a 10-20 científics (Figura 13.1).
La forma d'un vaixell de recerca està determinada per la necessitat d'una coberta de treball raonablement gran, diversos chigres potents per baixar i recuperar la instrumentació i almenys un pòrtic, una estructura que permet que un cable pugui anar des del cabrestant del vaixell pel costat del vaixell o per la popa i verticalment a l'aigua (Figura 13.2).
 Figura 13.2
Figura 13.2
El requisit d'estar al mar durant llargs períodes de temps, romandre immòbil mentre que l'equip és operat per la borda i moure's a una velocitat molt lenta quan l'equip és remolcat pel darrere, demana requeriments addicionals al disseny del vaixell d'investigació. Per augmentar la resistència (el nombre de dies que un vaixell pot romandre en el mar abans de quedar-se sense combustible) els vaixells de recerca tenen una velocitat d'operació moderada de 10 - 12 nusos (18 a 28 km/h). Això és comparable amb les velocitats d'operació de 15 a 20 nusos per als vaixells mercants. La majoria dels vaixells de recerca tenen una autonomia de 20 - 25 dies, que els dóna un rang de 6.000-8.000 milles nàutiques (11.000-14.800 quilòmetres) suficient per operar a alta mar a uns pocs dies de port. Només les principals institucions oceanogràfiques del món operen vaixells de recerca amb capacitat de recerca mundial.
Tots els vaixells moderns estan propulsats per motors dièsel. Aquests motors treballen millor operant a una velocitat gairebé constant. Els vaixells mercants no han de variar la seva velocitat durant el seu viatge, la seva hèlix es mou directament des del motor. S'utilitzen diversos mecanismes per permetre que els vaixells d'investigació puguin funcionar a velocitats molt lentes. En sistemes dièsel-elèctrics, els motors dièsel donen potència a un motor elèctric que és el que acciona l'eix de l'hèlix. Els motors elèctrics treballen de manera eficient a qualsevol velocitat, permetent un control molt precís de la velocitat del vaixell. En una altra disposició, el motor dièsel acciona una "hèlix de pas variable". En aquesta hèlix el pas de les pales (l'angle de la fulla) es pot controlar per donar a l'hèlix una empenta molt baixa, o nula fins i tot, amb la rotació completa de l'hèlix.
Descendre equips sobre el costat d'un vaixell requereix quelcom més que una empenta zero. Sense un control actiu de la posició la nau aniria a la deriva amb el vent i a través del cable de l'instrument. Per mantenir el cable vertical i lliure del buc de la nau, el vaixell ha de contrarestar els efectes del vent i el corrent. Això s'aconsegueix normalment a través d'un parell de propulsors addicionals, un a la proa i un altre a la popa, que poden empènyer el vaixell cap als costats. L'hèlix de proa és o bé una hèlix fixa en un túnel horitzontal a través del casc del vaixell o una hèlix sobre un eix que es pot orientar en qualsevol direcció i retreure-la quan el vaixell està en marxa. El propulsor de popa és o bé un túnel semblant o una hèlix construïda en el timó de la nau (un "timó actiu"). Els dos propulsors junts permeten un control molt precís sobre el comportament del vaixell amb el vent, les onades i els corrents i fan que pugui donar la volta a si mateix sobre el terreny si fos necessari.
 Figura 13.3
Figura 13.3
Els requisits mínins en termes de laboratoris que hi han d'haver consisteixen almenys d'un laboratori humit per a operar les mostres d'aigua, un laboratori de computació per al processament de dades, un laboratori d'electrònica per a la preparació d'instruments i un laboratori químic per a l'anàlisi d'aigua de les mostres. Els vaixells més grans de recerca dissenyats per a la recerca multidisciplinària tenen altres laboratoris biològics, geofísics i geològics. La figura 13.3 mostra un arranjament típic de la coberta d'un vaixell de recerca de grandària mitjana.
Els vaixells de recerca són costosos d'operar (15.000-25.000 $ per dia al mar). Durant moltes dècades han estat l'únic tipus de plataforma disponible per a la recollida de dades a alta mar. L'arribada de fondejos d'aigües profundes, els satèl·lits i boies de deriva autònomes ha reduït la seva importància, però els vaixells d'investigació segueixen sent una eina essencial en la investigació oceanogràfica. Ara es fan servir principalment per a campanyes de gran escala quasi-sinòpticas dels camps de les propietats oceàniques i per realitzar estudis específics (com ara la barreja a través de fronts, la determinació del balanç de calor de regions petites de l'oceà, etc.).
Els fondejos són plataformes adequades allà on es requereixen mesures en un mateix lloc durant un període de temps perllongat. El seu disseny depèn de la profunditat de l'aigua i del tipus d'instrumentació per al qual el fondeig s'ha dissenyat, però els elements bàsics d'un fondeig oceanogràfic són una àncora, una línia d'atracada (cable o corda) i un o més elements de flotació que mantenen l'amarratge en posició vertical i preferentment el més aprop de la vertical com sigui possible.
 Figura 13.4
Figura 13.4
ELs fondejos subsuperficials s'utilitzen en aigües profundes en situacions on la informació sobre la capa superficial no és essencial per a l'experiment. La flotabilitat principal, a la part superior de la línia d'amarratge, es col·loca al voltant del 20 - 50 m per sota de la superfície de l'oceà. Això té l'avantatge que el fondeig no està exposat a l'acció de les ones de superfície i no hi ha risc de ser malmès pel trànsit de vaixells o ser vandalitzat o robat. La figura 13.4 mostra un típic fondejos d'aigües profundes. La flotabilitat principal està a la part superior de la línia del fondeig. Per protegir el fondeig contra les picades de peixos, s'utilitza un cable per a la part superior, més o menys 1000 m de la línia del fondeig, mentre que la corda s'utilitza per sota.
Per mantenir el fondeig aprop de la vertical ha de tenir una resistència mínima, que només es pot aconseguir mantenint el diàmetre del cable petit. Això requereix una càrrega petita dels instruments sobre el cable. La flotabilitat addicional es distribueix al llarg del cable per compensar el pes de la instrumentació. La flotabilitat està disposada de manera que tots els sectors del fondeig flotin permetent la recuperació d'un fondeig que hagi perdut la seva part superior.
A la part inferior d'un fondeig profund, just per sobre del mort, hi ha un alliberador controlable remotament. Es pot activar a través d'un senyal acústic codificat des del vaixell quan és el moment de recuperar el fondeig. L'activació del llargat permet al fondeig pujar a la superfície. El mort, en general un bloc de ciment o un grup de rodes de ferrocarril en desús, es deixa en el fons de l'oceà.
 Figura 13.5
Figura 13.5
Un experiment que inclou la capa de superfície o la recollida de dades meteorològiques requereix un fondeig de superfície. L'element principal de flotabilitat del fondeig pren la forma d'una boia que flota substancialment en la superfície i que pot portar la instrumentació meteorològica (Figura 13.5). Els fondejos de superfície sobre l'oceà profund són majoritàriament fondejos tensos. Es fa servir només corda a la línia del fondeig i es fan un tant per cent més curt que la profunditat de l'aigua. Això fa tibar la corda i el manté sota tensió per mantenir el fondeig vertical. El fondeig de "catenària inversa" també es fa servir; això és una disposició en la qual s'inclou una secció de flotació de la línia del fondeig entre dues seccions no flotants que causen el perfil de la línia per formar una forma de S. En aquesta configuració, la longitud de la línia del fondeig no és crítica i és aproximadament un 25% més gran que la profunditat de l'aigua.
 Figura 13.6
Figura 13.6
Els fondejos en la plataforma continental, on la profunditat de l'aigua no excedeixi de 200 m, no requereix alliberadors acústics si s'utilitza un fondeig de tipus U. Un fondeig de tipus U es composa d'un fondeig superfícial o subsuperficial per portar la instrumentació, una línia de terra d'aproximadament el doble de la profunditat de l'aigua i un segon fondeig en segon lloc amb una petita boia de senyalització (Figura 13.6). En el moment de recuperar el fondeig, la boia de senyalització es recupera primer, seguit dels dos ancoratges i finalment el propi fondeig. Els fondejos tipus U solen ser "fondejos tous", la línia del fondeig és més gran que la profunditat de l'aigua, i el fondeig canvia amb el corrent d'entrada.
L'arribada de la tecnologia dels satèl·lits va obrír la possibilitat de mesurar alguns camps de propietats dinàmiques des de l'espai. L'avantatge d'aquest mètode és la cobertura quasi sinòptica de tots els oceans i un accés còmode a regions oceàniques remotes. Els satèlits han esdevingut una heina indispensable per la recerca climàtica. La restricció més gran del mètode és que els satel·lits només poden veure la superfície de l'oceà i per tant només donen una informació limitada sobre l'interior de l'oceà.
Molts satèl·lits s'anomenen pels sensors que porten. Estrictament parlant, el satèl·lit i els sensors són dues coses separades. El satèl·lit és una plataforma, els sensors són instruments. Una ullada dels sensors disponibles en els satel·lits es fa en la discussió més endavant sobre els instruments.
Com a plataformes d'observació, els satèl·lits cauen dins de tres grups. Molts dels satèl·lits segueixen òrbites inclinades: les seves trajectòries el·líptiques estan inclinades respecte de l'Equador. El grau d'inclinació determina quant de lluny des de l'Equador poden veure la Terra. Les inclinacions típiques estan al voltant de 60º; de forma que el satèl·lit cobreix la regió des de 60ºN fins 60ºS. Aquesta regió es cobreix frequentment completant una òrbita al voltant de la Terra en aproximadament 50 minuts.
Alguns satèl·lits tenen una inclinació de quasi bé o exactament 90º i poden veure els dos pols; volen en òrbites polars. Una alçada característica dels satèl·lits en òrbites polars o inclinades és de 800 km
El tercer i últim grup són els satèl·lits geeostacionaris. Orbiten la Terra a la mateixa velocitat amb la qual la Terra rota al voltant del seu eix i per tant són estacionaris respecte a la Terra. Aquesta situació només és posssible si el satèl·lit està sobre l'Equador i una òrbita a una alçada de 35.800 km, molt més alta que tots els altres satèl·lits. Els satèl·lits geoestacionaris no poden veure els pols.
La sel·lecció d'un satèlit com a plataforma logicament inclou la sel·lecció d'un sensor i una òrbita dessitgable. Un sensor de gel per monitorejar la capa de gel polar no funcionarà gaire bé en un satèl·lit geosestacionari; un generador d'imatges de núvols per predir el temps no es col·locarà en una òrbita polar.
Els submergibles no són plataformes fetes servir frequentment en oceanografia física, però això canviarà en els pròxims anys. Es poden distingir tres tipus bàsics, submergibles pilotats, submergibles controlats remotament i submergibles autònoms.
Els submersibles pilotats es fan servir a geologia marina per l'exploració del fons marí i ocasionalment a biologia marina per estudiar els ecosistemes del fons marí. No són una heina per l'oceanografia física.
Els submergibles remotament controlats són utlitzats frequentment per la indústria del gas i del petroli per recuperar les caixes negres dels avions que cauen a l'oceà. Per a la ciència es fan servir pels mateix usos que els sumergibles tripulats però novament no són una heina per l'oceanografia física.
Els submergibles autònoms són vehicles autopropulsats que poden ser programats per a seguir una trajectoria submarina prefixada. Aquest vehicles tenen un gran potencial per a l'0ceanografia física. Algunes de les organitzacions de recerca oceanográfica estan desenvolupant vehicles per a transportar instrumentació com ara bé un CTD i monitorar un àrea determinada submergint-se i emergint al llarg d'una trajectòria d'un costat d'una regió fins una altre transmetent les dades col·leccionades via satèl·lit quan es troba a la superfície. Algun temps ha de passar encara abans que aquests vehicles siguin d'us regular. Eventualment els submergibles autònoms reduiran la necessitat del vaixells oceanogràfics pel monitoreig.
Els vehicles arrosegats es fan servir des de vaixells de recerca per a estudiar processos oceànics que requereixen una gran ressolució spacial com ara la barreja en fronts i els processos de la capa superficial oceànica altament variables. La majoria dels sistemes consisteixen en un vehicle submarí amb un cos aerodinàmic, un cable de tracció electromecànic (sovint multiconductor) i un chigre. Addicionalment al paquet de sensors (normalment un CTD, i sovint sensors per a mesures químiques) porta sensors de pressió, to i rotlle per controlar el seu vol. Les dades són enviades al sistema d'adquisició mitjançant un cable. El mateix cable es fa servir per enviar comandes al vehicle per modificar l'angle de les seves ales.
 Figura 13.7
Figura 13.7
La figura 13.7 mostra un vehicle arrosegat durant el seu llargat. Un vol típic d'aquest vehicle cobreix un rang de fondària aproximadament entre 250-500 m que pot triar-se dins de l'interval des de la superfície fins a 800 m de fondària. El vehicle és arrossegat a 6-10 kn (10-18 km/h) i travessa el rang de 250 m aproximadament una vegada cada 5 minuts. Quan transporta un CTD això resulta en una secció vertical de temperatura i salinitat amb una resolució temporal d'aproximadament 1 km
Un sistema alternatiu de vehicle arrossegat no fa servir un vehicle submergit per transportar el paquet de sensors, però disposa de sensors (per exemple termistors) en el mateix cable de tracció a intervals prefixats. Donat que la distància entre sensors està fixada i els sensors romanen a la mateixa fondària durant l'arrossegament, aquesta carena de termistors no ofereixen la mateixa resolució espacial de les dades com els sistemas ondulants i són rarament utilitzats avui en dia.
Les característiques principals dels flotadors i els derivadors és que es mouen lliurament amb el corrent oceànic, de forma que la seva posició en qualsevol moment donat pot ser controlada de forma molt limitada. Fins fa una dècada aquestes plataformes van ser utilitzades en regions remotes com ara bé els mars del Sud i en les parts centrals de les conques oceàniques que són rarament visitades pels vaixells oceanogràfics i on és difícil i molt car col·locar un fondeig. Actualment s'han convertit en una peça fonamental d'un nou sistema d'observació que cobreix enterament l'oceà.
Estrictament parlant un flotador és un terme genèric per a qualsevol cosa que no s'enfonsa fins al fons de l'oceà. D'altra banda un derivador és una plataforma dissenyada per moure's amb el corrent oceànic. Per assolir això ha d'incorporar un sistema de flotació o flotador, però és quelcom més qu'això. Els ocenògrafs però fan servir els termes de forma molt lleugera i no fan una distinció clara entre "flotadors" i "derivadors".
 Figura 13.8
Figura 13.8
Es poden distingir dos tipus bàsics. Els derivadors de superfície tenen un flotador en la superfície i poden transmetre dades via satèlit. Si estan dissenyats per a col·leccionar informació sobre la superfície de l'oceà porten instruments meteorològics a sobre del flotadors i un sensor de temperatura o ocasionalment de salinitat a sota del flotador. Per evitar ésser transportats fora del àrea d'interès per vents forts estan enganxats a un àncora o mort a una fondària determinada (Figura 13.8). Si estan dissenyats per a donar informació sobre propietats subsuperficials de l'oceà, es col·loquen sensors addicionals entre el flotador de superfície i l'àncora. El rang de fondàries dels flotadors de superfície està limitat habitualment a menys de 100 m.
Els flotadors per a derivadors subsuperficials estan dissenyats per tenir flotabilitat neutra a una fondària donada. Aquests flotadors s'han fet servir per a seguir els corrents oceànics a diverses fondàries, des de pocs centenars de metres fins per sota dels 1000 m de fondària. Els primers d'aquests flotadors van transmetre les seves dades acústicament a través d'estacions receptores costaneres. Donat que el so viatge força bé a la fondària del mínim de velocitat del so (el canal SOFAR), aquest flotadors SOFAR només poden ser utilitzats a aproximadament 1000 m de fondària.
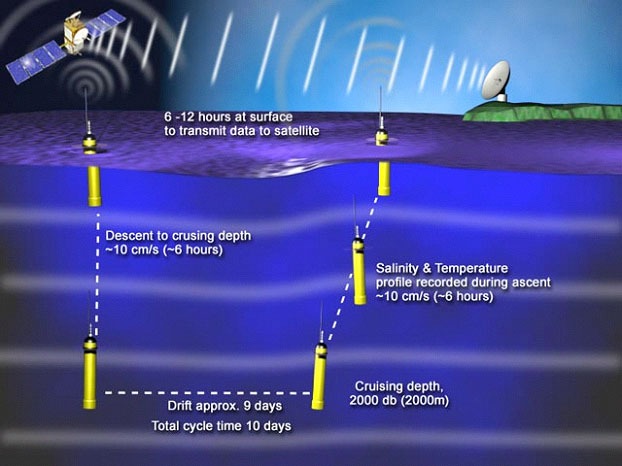 Figura 13.8a
Figura 13.8a
Els moderns flotadors subsuperficials romanen a una certa fondària per un període de temps, arriben a la superfície per transmettre breument les seves dades a un satèl·lit i retornen a la fondària prefixada. Aquests flotadors poden ser programats per a qualsevol fondària i poden obtenir la temperatura i salinitat (CTD) durant la seva ascensió. El conjunt de flotadors més important, coneguts com ARGO, vàren començar l'any 2000. Els flotadors ARGO mesuren la temperatura i la salinitat dels primers 200 m de l'oceà (Figura 13.8a). Això permet un monitoreig continu de l'estat del clima de l'oceà, amb totes aquestes dades distribuïdes i fetes públiques algunes hores després d'èsser adquirides. Quan el programa ARGO sigui completament operacional hi haurà 3000 flotadors a tot l'oceà en qualsevol moment.
Aquesta secció dóna un cop d'ull als sensors i paquets d'instrumentació per la mesura de la temperatura, salinitat, oxígen, nutrients i traçadors.

Les primeres mesures de temperatura a una fondària donada per sota de la superfície van ser fetes portant una mostra d'aigua a bord del vaixell en una ampollla aillada i mesurant la temperatura amb un termòmetre de mercuri. Encara que aquestes mesures no van ser acurades, van proporcionar la primera evidència que per sota dels 1000 m, l'oceà es fred inclús en els tròpics. També van mostrar que és necessari prendre mesures molt acurades per resoldre les petites diferències de temperatura entre les diferents regions de l'oceà.
El primer instrument que (a través de l'ús del mostreig múltiple i promitjat) va permetre la necessària ressolució de 0.001 ºC va ser el termòmetre reversible. Consisteix en un tub plé de gas de mercuri en una espiral de 360º. El tub està restringit a una amplada capil·lar a la bobina i té un apèndix capil.lar (Figura 13.9). L'instrument es baixa fins a una fondària dessitjada. El mercuri a partir del reservori al fons puja en proporció a la temperatura que hi ha fora. Quan s'arriba a la fondària dessitjada el termòmetre es gira cap a baix (inrevés), però el flux del mercuri s'interrumpeix a l'apèndix capil·lar, i només el mercuri que estava per sobre del punt de ruptura es recull en la part més baixa del tub de vidre. Aquesta part porta una graduació calibrada que permet llegir la temperatura quan el termòmetre es retorna a la superfície.
Per eliminar l'efecte de la pressió, que comprimeix el tub i causa la pujada de més mercuri per sobre del punt de ruptura durant la baixada de l'instrument, el termòmetre es tanca en un dipòsit de vidre resistent a la pressió. Si aquest termòmetre reversible protegit es fa servir en conjuncció amb un termòmetre invertit sense protegir (un termòmetre exposat a l'efecte de la pressió) la diferència entre les dues lectures dels termomètres poden fer-se servir per a determinar la pressió i així la fondària a la qual la lectura es va fer. El termòmetre reversible és dons un instrument per mesurar la fondària a més a més.
Els termòmetres reversibles requereixen un vaixell com a plataforma i es fan servir en conjunció amb les ampolles Nansen and Niskin en dispositius multi-mostra.
La mesura de la salinitat, de l'oxígen, dels nutrients i de la concentració de traçadors requereix una col·lecció de mostres d'aigua a partir de diverses fondàries. Aquesta tasca essencial s'assoleix mitjançant l'ús d'ampolles d'aigua. La primera ampolla d'aigua va ser desenvolupada per Fritjof Nansen i es coneix com ampolla Nansen. Consisteix en un cilindre de metall amb dos mecanismes de tancament rotatoris als seus extrems. L'ampolla s'enganxa a un cable (Figura 13.10). Quan l'anpolla es baixa fins una fondària donada està oberta en els seus extrems, de forma que l'aigua flueix lliurament a través. A la fondària on la mostra d'aigua s'ha de prendre, l'extrem superior de l'ampolla es desconecta del cable i l'ampolla capgira. Això tanca les dues vàlvules i atrapa la mostra, que pot portar-se cap a la superfície.
 Figura 13.10
Figura 13.10
En una "estació oceanogràfica" varies ampolles s'enganxen a un cable fi a intervals regulars i són baixades dins del mar. Quan les ampolles arriben a la fondària desitjada, un pes de metall (missatger) es fa caure cap avall pel cable per disparar el mecanisme de tancament de la part superior de l'ampolla. El mateix mecanisme deixa anar un nou missatger des de l'ampolla, aquest missatger baixa de nou pel cable per arribar a la segona ampolla i així fins l'última ampolla.
 Figura 13.11
Figura 13.11
L'ampolla Nansen està ara ampliament substituïda per l'ampolla Niskin (Figura 13.11). Basada en la idea de Nansen, incorpora dues importants modificacions. El seu cilindre està fet de plàstic, el qual elimina la reacció química entre l'ampolla i la mostra que pot interferir amb la mesura dels traçadors. El seu mecanisme de tancament no precisa capgirar l'ampolla; les vàlvules de dalt i de baix es mantenen obertes per cordes i tancades per una banda elàstica. Donat que l'ampolla Niskin està fixada en el cable en dos punts en lloc d'un (com era el cas de l'ampolla Nansen) fa més fàcil augmentar el volum mostrejat. Les ampolles Niskin de diferents tamanys es fan servir per agafar mostres de diversos traçadors.
Les ampolles Nanses i Niskin es fan servir en conjuncció amb els termòmetres reversibles. A l'ampolla Nansen el termòmetre està muntat en un marc fix, l'inversió s'acompleix quan l'ampolla capgira. En les ampolles Niskin els termòmetres estan muntats en un sistema de referència que gira.
 Figura 13.12
Figura 13.12
Avui en dia l'instrument estàndard per mesurar la temperatura i la salinitat i sovint el contingut d'oxígen és el CTD, que és l'acrònim en anglés de conductivitat, temperatura i fondària (conductivity, temperature, depth, figura 13.12). Fa servir un principi de mesura elèctrica. Un termòmetre de platí canvia la seva resistència elèctrica amb la temperatura. Si s'incorpora un oscil·lador elèctric, un canvi en la seva resistència produeix un canvi de la frequència d'oscil·lació, que pot ser mesurada. La conductivitat de l'aigua de mar pot ser mesurada de la mateixa manera com un canvi de la frequència d'un segon oscil·lador, i un canvi de la pressió produeix un canvi de la frequência en un tercer oscil·lador. El senyal combinat s'envia mitjançant un cable conductor simple amb el qual el CTD es baixat. Això produeix un registre continu de la temperatura i la conductivitat com a funcions de la pressió a un ritme de fins a 30 mostres per segon; una millora remarcable respecte els 12 punts produïts per les 12 ampolles Nansen i Niskin que poden fer-se servir en una única estació.
Els circuits elèctrics permeten mesures en una successió ràpida però pateixen d'una deriva instrumental, que significa que la seva calibració canvia amb el temps. Els sistemes CTD d'una altre banda necessiten ser calibrats comparant les seves lectures regularment contra instruments més estables. Són d'una altra banda usats en conjunció amb els termómetres reversibles i amb un dispositiu multi-mostra
 Figura 13.13
Figura 13.13
Els dispositius multi-mostra d'aigua permeten l'ús d'ampolles Niskin amb cable conductor elèctric. Diversos fabricants posen noms diferents als seus productes, com ara bé rosette o carrusel. En tots el productes les ampolles Niskin es disposen en una plataforma circular (Figura 13.13) amb un CTD muntat habitualment a sota o en el centre.
Els avantatges dels dispositius multi-mostra en front de l'ús del cable hidrogràfic amb misssatgers és que les ampolles d'aigua poden tancar-se per control remot. Això significa que les fondàries de mostreig no tenen que ser preparades abans de baixar les ampolles i poden tancar-se per control remot.
La introducció del CTD obre la possibilitat de fer mesures continues de temperatura i salinitat en la superficie. L'aigua a través de l'entrada d'aigua freda al vaixell es pot bombejar a través d'un tanc en el qual un sensor de temperatura i conductivitat estan instal·lats. Aquest sistema s'anomena termosalinògraf.
La gran majoria dels instruments oceanogràfics des de l'espai estan basats en l'ús de radiòmetres, instruments que mesuren l'energia electro-magnètica irradiada des de la superfície. Aquesta radiació succeeix en un rang de longituds d'ona, incloent-hi l'emissió de llum en el rang visible, calor en el rang d'infraroig, i a escales més curtes com ara els rajos radar i X. La majoria dels radiòmetres oceanogràfics operen en varies bandes de longitud d'ona. Una discussió detallada de totes les aplicacions va més enllà de l'objectiu d'aquestes lliçons, de forma que només els sistemes més bàsics són mencionats aquí.
El radiòmetres que operan a l'infraroig es fan servir per mesurar la temperatura de superfície. La seva resolució ha augmentat constantment aquest anys. L'AVHRR (de l'anglés Advanced Very High Resolution Radiometer) té una resolució molt propera a 0.2º C.
Els radiòmetres multi-epectrals mesuren en vàries bandes de longituds d'ona. Per comparació de la senyal de radiació rebuda en diferents longitud d'ona és possible mesurar la cobertura i l'edat del gel, el contingut de clorofil·la, la càrrega de sediment, la matèria particulada i altres quantitats d'interés per a la biologia marina.
Les mesures en longituds d'ona del radar estan fetes per un instrument conegut com SAR (de l'anglés Synthetic Aperture Radar). Pot fer-se servir per detectar l'expressió en superficie de les ones internes, l'efecte de la pluja en les ones de superficie, l'efecte de la topografia marina en els corrents i les onades, i un ample ventall d'altres fenòmens. Molts d'aquestes fenòmens entren en la categoria de "propietats dinàmiques" dicutides més avall.
Tots els instruments discutits abans produeixen informació sobre el camps d'una propietat oceànica independentment del estat dinàmic de l'oceà. Durant el que queda d'aquesta lliçó repasarem l'instrumentació dissenyada per mesurar el moviment de l'oceà.
Una manera elemental d'observar el moviment oceànic és l'ús de derivadors. Com s'ha mencionat abans els derivadors són plataformes dissenyades per portar instruments. Però totes les mesures obtingudes amb derivadors són inútils a menys que estiguin relacionades amb les posicions a l'espai. Un dispositiu de georeferenciació (GPS), que trameti la posició del derivador envers un enllaç per satèl·lit, és essencial en qualsevol derivador i llavors això converteix el derivador en un instrument per mesurar corrents oceàniques. Que sigui prou útil o no depèn del seu disseny, i particularment del seu tamany, forma i del seu ancoratge.
 Figura 13.14
Figura 13.14
Els corrents oceànics poden ser mesuratss de dos maneres. Un instrument pot enregistrar la velocitat i direcció del corrent, o pot mesurar les component est-oest i nord-sud del corrent (Figura 13.14). Ambdós mètodes requereixen informació direccional. Tots el correntòmetres d'altra banda incorporen un compàs magnètic per a determinar l'orientació de l'instrument respecte el pol Nord magnètic. Es poden dintingir quatre classes de correntòmetres, basats en el mètode per mesurar la magnitud del corrent.
Els correntòmetres mecànics fan servir un dispositiu similar a un sistema de propulsió amb turbina, un rotor de Savonius o una roda de paletes (Figura 13.15) per mesurar la velocitat del corrent, i una beina per a determinar la direcció dels corrents. Els sensors tipus turbines mesuren sovint la velocitat correctament només si apunten cap al corrent i han d'estar orientats de cara al corrent tot el temps. Aquests instruments són d'altra banda col·locats amb una beina ampla, que gira l'instrument i amb ell el rotor segons els corrents.
 Figura 13.15
Figura 13.15
Els propulsors poden ser dissenyats per a tenir una resposta tipus cosinus amb l'angle d'incidència del flux. Dos d'aquests propulsors disposats a 90 graus poden resoldre els vectors del corrent i no requereixen una beina d'orientació.
L'avantatge del rotor de Savonius és que el ritme de rotació és independent de la direcció d'exposició al corrent. Un correntòmetre amb rotor de Savonius no precisa dons estar orientat cap el corrent d'una manera determinada, i la seva beina pot rotar independentment i pot ser molt petita i prou ampla per seguir la direcció de forma fiable.
Amb l'excepció del correntòmetre de dues hèlixs disposades amb una resposta de tipus cosinus a 90° l'un a l'altre, els correntòmetres mesuren la velocitat del corrent comptant el nombre de revolucions de l'hèlix o rotor per unitat de temps i la direcció del corrent mitjançant la determinació de l'orientació de paletes a intervals fixats. En altres paraules, aquests mesuradors de corrent combinen una velocitat integral en el temps o mitjana en un interval de temps establert (el nombre de revolucions entre registres) amb una lectura instantània de la direcció del corrent (l'orientació de paletes en el moment del registre). Això dóna només un enregistrament fiable del corrent oceànic si el corrent canvia lentament en el temps. Aquests correntòmetres mecànics no són adequats per la mesura del corrent a la capa superficial oceànica on la major part del moviment oceànic és degut a les onades.
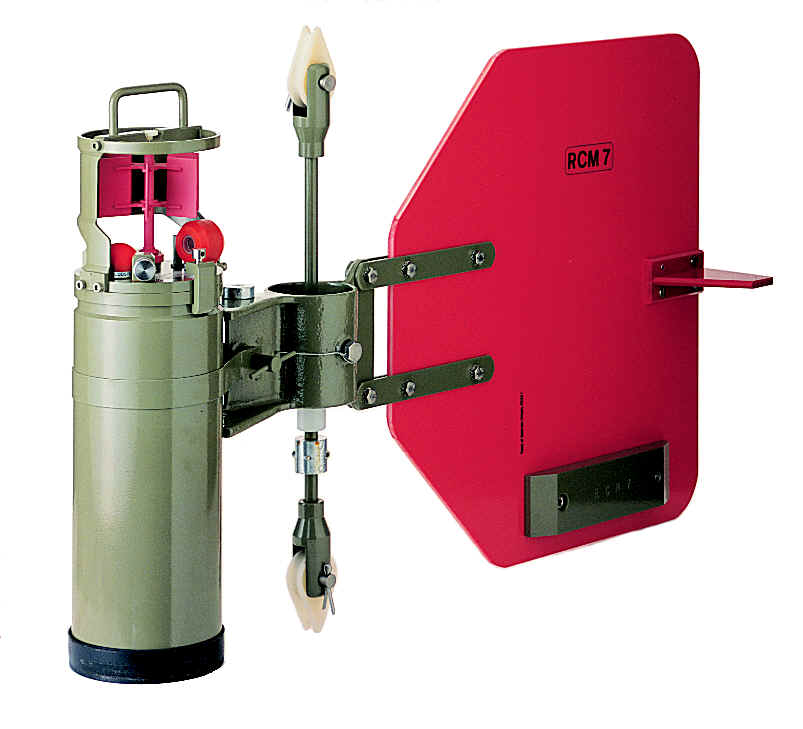 Figura 13.16
Figura 13.16
El rotor Savonius és particularment problemàtic en aquest sentit. suposem que el correntòmetre està en una situació en que el moviment de l'aigua és només degut a les onades. El corrent oscil·la endavant i enrera però el corrent mig és zero. Un rotor Savonius recollirà l'actual corrent de l'onada amb independència de la seva direcció, i el recompte de rotacións donarà la impressió d'un fort corrent mig. El rotor amb una roda de paletes està dissenyat per rectificar aquesta situació, la roda de paletes rota cap enrere i cap endavant amb l'ona, de manera que el seu recompte representa el veritable corrent mig (Figura 13.16).
Els correntòmetres mecànics són robustos, fiables i comparativament de baix cost. S'utilitzen àmpliament on les condicions són adequades, per exemple en profunditats fora de l'abast de les onades superficials.
Els correntòmetres electromagnètics exploten el fet que un conductor elèctric movent-se a través d'un camp magnètic indueix un corrent elèctric. L'aigua de mar és un molt bon conductor (vegeu la Lliçó 3), i si es mou entre dos elèctrodes el corrent elèctric induït és proporcional a la velocitat de corrent oceànic entre els elèctrodes. Un correntòmetre electromagnètic té una bobina per produir un camp magnètic i dos conjunts d'elèctrodes, fixat en angle recte entre si, i determina la velocitat a la qual l'aigua passa entre ambdós conjunts. Mitjançant la combinació dels dos components de l'instrument es determina la velocitat i la direcció del corrent de l'oceà.
Els correntòmetres acústics es basen en el principi que el so és una ona de compressió que viatja amb el medi. suposem un dispositiu amb un transmissor de so entre dos receptors en un corrent oceànic. suposem que el receptor A es troba aigües amunt de l'emissor, i suposem que el receptor B està situat aigües avall. Si un pols de so es genera en el transmissor arribarà al receptor B abans que al receptor A, transportat pel corrent de l'oceà.
Un típic correntòmetre acústic tindrà dues trajectòries de so ortogonals d'aproximadament 100 mm de longitud amb un receptor/transmissor a cada extrem. Una pols de so d'alta freqüència es transmet simultàniament des de cada transductor i la diferència en l'hora d'arribada del so que viatja en direccions oposades dóna la velocitat de l'aigua al llarg del camí.
Els correntòmetres electromagnètics i acústics actuals no tenen parts mòbils i per tant poden prendre les mesures a una freqüència de mostreig molt alta (fins a desenes de lectures per segon). Això els fa útils no només per a la mesura dels corrents oceànics, sinó també per al corrent de les onades i mesures de turbulència.
Els perfiladors acústics de corrent per efecte Doppler (ADCP) operen amb el mateix principi que els correntòmetres acústics, però tenen el transmissor i el receptor en una sola unitat i fan servir les reflexions de l'ona acústica de partícules en moviment per a la mesura. L'aigua de mar conté sempre una multitud de petites partícules en suspensió i d'altres matèries sòlides que no totes poden ser visibles a simple vista però reflecteixen el so. Si el so es transmet en quatre feixos inclinats en angle recte entre si, el corriment Doppler de la freqüència del so reflectit proporciona la velocitat de les partícules al llarg del feix. Amb almenys 3 feixos inclinats respecte a la vertical les 3 components de la velocitat de flux poden ser determinades. Els diferents temps d'arribada indiquen el so reflectit a diferents distàncies dels transductors, de manera que un ADCP proporciona informació sobre la velocitat actual i la direcció no només en un punt en l'oceà, però per a un rang de profunditats determinades, és a dir, un ADCP produeix un perfil de corrent segons la fondària.
 Figura 13.17
Figura 13.17
Diferents dissenys d'ADCP serveixen per a diferents propòsits (Figura 13.17). Els ADCP profunds tenen una resolució vertical de 8 metres (en general produeixen una mesura del corrent per cada 8 metres d'increment de profunditat) i un rang típic de fins a 400 m. ADCP dissenyats per a mesures en aigües someres tenen una resolució de 0,5 m en general i un abast de fins a 30 m. L'ADCP es pot col·locar en fondejos, instal·lat en vaixells per a mesures submarines, o es baixa amb un CTD i dispositiu multi-mostra per donar un perfil de corrent en un gran rang de profunditats.
Els paràmetres d'interès en el mesurament de l'onatge superficial són l'alçada de l'ona, el període i la direcció de les ones. En els llocs propers a la riba la altura de l'ona i el període d'ona es poden mesurar mitjançant el principi del mareògraf de flotador, descrit en la secció dels mareògrafs a continuació, amb una obertura prou àmplia com per permetre que les ones superficials passin sense obstacles. Les mesures d'onatge a la plataforma, però a certa distància de la línia de costa, es poden obtenir a partir d'un mesurador de pressió (vegeu també a l'apartat dels mareògrafs).
Un instrument adequat per a tots els llocs, incloent el mar obert és l'olígraf (wave rider), una boia de superfície petita en un ancoratge al port que segueix el moviment de les ones. Un acceleròmetre vertical dins de la boia mesura l'acceleració d'aquesta generada per les ones. Les dades s'emmagatzemen internament ja sigui per a una posterior recuperació o per transmetre-les a la vora. Els olígrafs proporcionan informació sobre l'alçada d'ona i el període de l'onatge. Si estan equipats amb un sistema de 3 acceleròmetres ortogonals també registren la direcció de les onades.
 Figura 13.18
Figura 13.18
Les marees són ones de longitud d'ona llarga i període conegut, de manera que les propietats de major interès per a mesurar-les són l'alçada d'ona, o rang de marea, i el corrent induït. Aquest últim es mesura amb correntòmetres; qualsevol tipus és adequat. Dos tipus de mareògrafs s'utilitzen per mesurar l'amplitud de la marea. El mareògraf de flotador es compon d'un cilindre amb una connexió amb el mar a la part inferior. Aquesta connexió actua com un filtre de pas baix: es limita de manera que el moviment de l'aigua cap enrere i cap endavant associat a les ones de vent i altres ones de curt període de temps no poden passar a través, i només el canvi lent del nivell de l'aigua associat amb la marea pot així entrar en el pou. Aquest canvi de nivell de l'aigua és captat per un flotador i enregistrat (Figura 13.18).
Els mareògrafs de flotador permeten la lectura directa del nivell d'aigua en qualsevol moment, però requereixen una instal·lació una mica laboriosa i no es poden instal·lar fora de la costa. En llocs remots i lluny de la costa sovint és més fàcil utilitzar un mesurador de pressió. Aquest instrument es col·loca al fons del mar i mesura la pressió de la columna d'aigua per sobre d'ell, que és proporcional al gruix d'aigua que hi ha damunt. Les dades es guarden internament i no és accessible fins que l'instrument es recupera.
Els mareògrafs es fan sevir cada vegada més per monitorar els possibles canvis a llarg termini en el nivell del mar relacionats amb la variabilitat climàtica i el canvi climàtic. La taxa esperada de canvi del nivell del mar és d'uns pocs mil·límetres per any com a màxim, una precisió tan alta és necessària per verificar els canvis. La majoria dels mareògrafs no són adequats per a això per una sèrie de raons. Per exemple, una tendència del nivell del mar observada a llarg termini també pot ser produïda per un pujada o baixada de la superfície de la Terra en la qual es va col·locar el mareògraf (això es coneix com subsidència). El cable en un pou d'estacament que connecta el flotador amb la unitat d'enregistrament es dilata i es contrau amb la pujada i baixada de la temperatura de l'aire. Aquests efectes són insignificants quan l'indicador s'utilitza per verificar la profunditat de l'aigua amb finalitat per la navegació, però no quan es tracta d'avaluar les tendències de mil·límetres per any. Una nova generació de mesuradors de marees s'està instal·lant a tot el món, i dóna els registres de nivell de l'aigua amb precisió absoluta d'uns pocs mil·límetres amb una subsidència a llarg termini. En aquests instruments la disposició del flotador i el filferro del pou d'estancament es substitueix per una mesura amb làser de la distància, i les dades es transmeten via satèl·lit a un centre mundial del nivell del mar que supervisa el funcionament de cada mesurador de forma contínua.
El nivell del mar també es pot mesurar des dels satèl·lits. Un altímetre mesura la distància entre el satèl·lit i la superfície del mar. Si la posició del satèl·lit es coneix amb precisió això dóna com a resultat una mesura del nivell del mar. Els altímetres moderns han arribat a una precisió de 5 cm. La cobertura mundial proporcionada pels satèl·lits permet la verificació dels models globals de marea. Quan es substrau la marea, els mesuraments proporcionen informació sobre la forma de la superfície del mar i, a través de l'aplicació del principi de geostrofia, la circulació oceànica a gran escala.
Aquesta breu visió general de les tècniques de mesura oceanogràfica només pot cobrir els aspectes essencials de les plataformes més importants i els instruments. Existeix equipament especial, i nous equipaments especials es dissenyen cada dia, per fer front a problemes específics. Un sensor de cisalla pot servir com un exemple. Està dissenyat per donar una idea de la turbulència oceànica a l'escala dels centímetres. La turbulència es caracteritza pels corrents que varien en distàncies curtes i els intervals curts de temps, de manera que un instrument dissenyat per mesurar la turbulència ha de ser capaç de resoldre les diferències de la velocitat actual i la direcció a través d'una distància vertical de no més d'un metre o menys.
Una sonda amb un sensor de cisalla és un instrument cilíndric de menys d'1 m de longitud amb dos correntòmetres electomagnètics o acústics els seus dos extrems. Mitjançant la mesura de la velocitat i la direcció en dos punts a menys d'1 m de separació permet la determinació de la cisalla del corrent en aquesta distància. Per obtenir una mesura fiable, no influenciada pel moviment agitat del vaixell la sonda cau lenta i lliurement a través de l'oceà. La seva profunditat màxima de busseig està programada abans de l'experiment, i la sonda torna a la superfície quan aquesta profunditat s'assoleix. A continuació, es va a recollir-ho amb el vaixell, i les dades registrades internament es recuperen.
Un altre tipus d'instrument de caiguda lliure utilitza sensors de microestructura que mesuren les fluctuacions de la velocitat en una escala espacial d'aproximadament 10 mm. S'utilitza un feix piezo-elèctric que genera petites tensions a mesura que la velocitat turbulenta fa variar la força d'ascenciò i per tant la força de flexió sobre un perfil aerodinàmic que es mou a través de l'aigua.